- このトピックには27件の返信、7人の参加者があり、最後にIboughtELONにより3ヶ月、 2週前に更新されました。
-
投稿者投稿
-
そうですか。完全カメラ式にしたのはてっきりコスト問題とばかり思っていました。
また、最終的にはLIDAR併用が良いんでしょうけどまだ高価なのと異種データの情報整理が面倒なのかな?と想像していました。
車の外観から他社の自動運転車は多くのセンサー類がてんこ盛りでテスラ車とは対照的なアプローチだなと見ていておもしろいです。A
#91554
ファントムブレーキの主な原因はカメラが影と壁を勘違いするのが原因だったはずです。
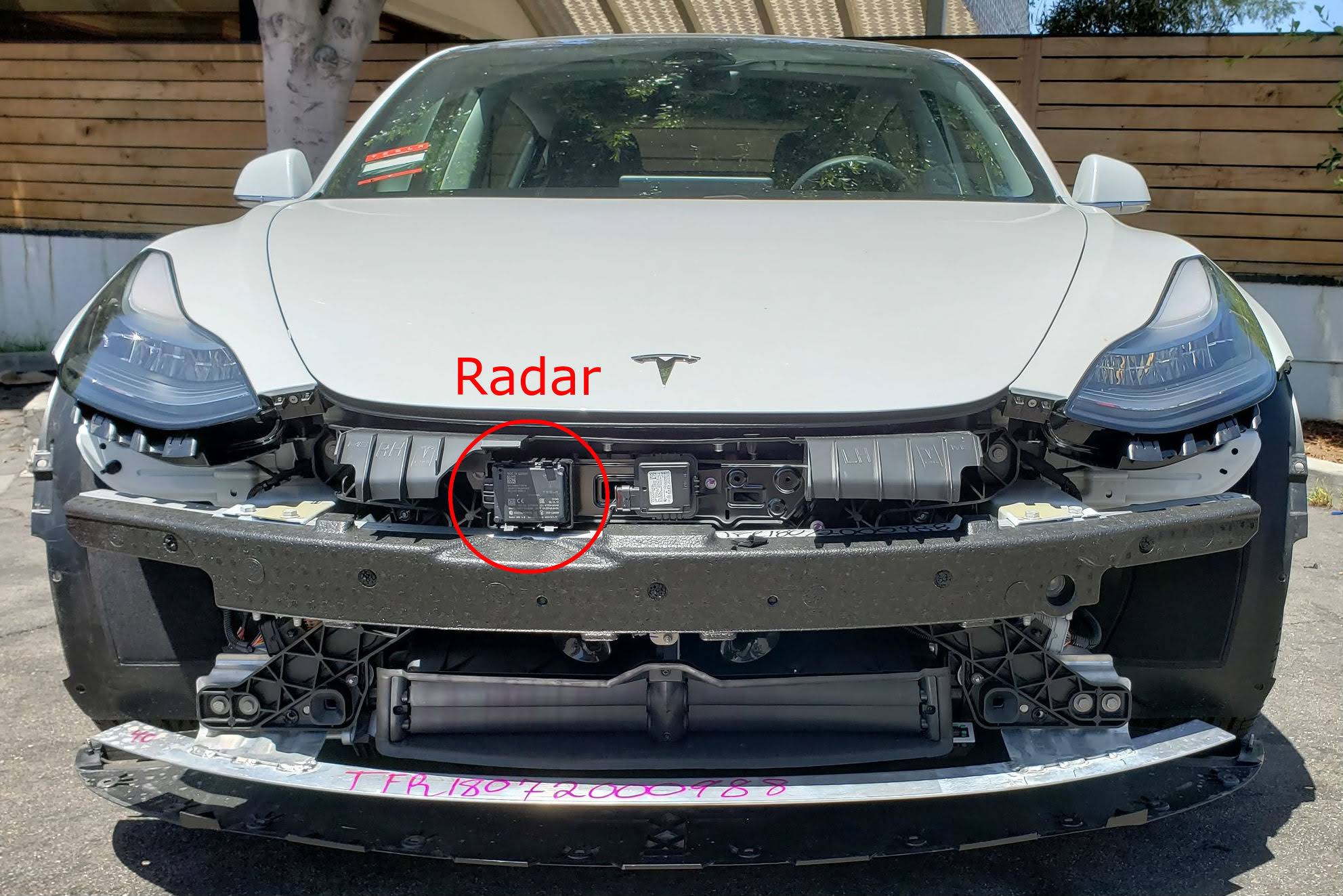
そもそもミリ波レーダー搭載車両は主にSXでモデル3では極一部のキメラ固体を除いて搭載されていないと思うのですが超音波ソナー(USS)と勘違いされていませんか?USSで計測できる範囲は主に1,2m程なので走行中前方に障害物があるかどうかを判断できるような能力はありません。低速走行時の緊急ブレーキに影響しますがAPからは参照されていなかったのでモデル3のファントムブレーキが減ったのはUSS廃止ではなくAPシステム(ソフト由来)が成熟したからという認識です。
レーダー削除はギガ上海製(2021.1〜)からなので、私のフリーモントにはミリ波レーダーがついており、実際に稼働していました。また、ごく一部のキメラ個体にのみというのは誤りで、それまでのすべてのモデル3に搭載されていました。ご確認ください。
https://teskas.net/forums/topic/53105/
https://teskas.net/forums/topic/45274/
Attachments:
約5年、フリーモント製のモデル3に乗っています。
最近のファントムブレーキは「不快」という程度に感じていますが、最初のころのファントムブレーキはもっと強烈でした。かなりよくなったとは思いますが、人間の運転ではやらないような不自然なブレーキはまだあるので、もう少しよくなるといいですね。
それより、発進時の急加速は簡単に修正できそうなものなので、それだけでも修正してくれるとかなり印象がよくなるんですけどね。
カメラとミリ波レーダーを併用したときの一番の問題は、情報の同期だと思います。
カメラからの情報とミリ波レーダーからの情報を完全に一致させるのは難しく、ほんの一瞬ずれがあります。
高速で走行する自動車の制御に使うので、ほんの一瞬のずれでも物体の位置の判断に差異が生じます。
差異が生じたときに、プログラムとしてはどちらを信じればよいのか、どう判断すればよいのかという難しい問題が生じます。ファントムブレーキの原因のひとつはこれであると説明されていたと思います。
なので、費用を気にしなければ LiDAR などいくつかのセンサーを併用するのがベストではないかという意見もありますが、そうとも言えないということだと思います。最初は2次元画像から正しい測距ができなかったため、レーダー搭載はやむを得なかったのだと思います。しかしミリ波レーダーは解像度が低く、偽のエコーも出るため橋やトンネルと障害物の区別がつきにくく、それらを誤検知した時にはドッカンと強烈なフルブレーキをかけるわけです。
そうこうしているうちに画像解析AIが進歩して、カメラだけで測距が可能となる一方でレーダーとカメラで矛盾した測定値を処理する負荷が増えました。それならばレーダーをやめてカメラの解像度と処理を増やしましょう(by イーロン)、という流れかと。
そのレーダー削除というElonの決断力が真似できない。ほんとようやるわ。
ところで、そろそろ試乗体験記がこのスレッドにポストされないかと、首を長ーくしております。
どなたか勇気を出して書き込んでくれませんか?期待してます。 -
投稿者投稿